
আজকে আমি আপনাদের দেখাবো যে আপনারা নিজে কিভাবে মোটর-motor টার্নিং সার্কিট তৈরি করতে পারবেন । মোটর টার্নিং সার্কিট সাধারণত ব্যবহার করা হয় ইনকিউবেটরের মোটর কন্ট্রোল করার জন্য । আমি যে মোটর টার্নিং সার্কিট তৈরী করে দেখাবো এটা শুধু মোটর টার্নিং করার জন্য নয় অর্থাৎ শুধুমাত্র ইনকিউবেটরের জন্য এটা ব্যবহার করা হবে না । এটা বিভিন্নভাবে আপনি ব্যবহার করতে পারবেন । বাটন এর সাহায্যে মোটর অন অফ করার জন্য যত রকমের প্রজেক্ট করা যায় সে সকল প্রজেক্টে আপনি কিন্তু এই কন্ট্রোলিং সিস্টেম টা ব্যবহার করতে পারবেন । এখন চলুন আমরা জেনে নিই এই প্রজেক্টে করার জন্য আমাদের কি কি কম্পোনেন্ট এর প্রয়োজন হবে।
- Arduino Uno R3 board.
- LCD Display.(16*2)
- Push button Switch.
- Buzzer.
- Relay Module.
- MPS3638 PNP Transistor.
- 10K resistor.
- 1N4148 Diode.
- 1K resistor.
- Turning motor.
- Connecting wire.
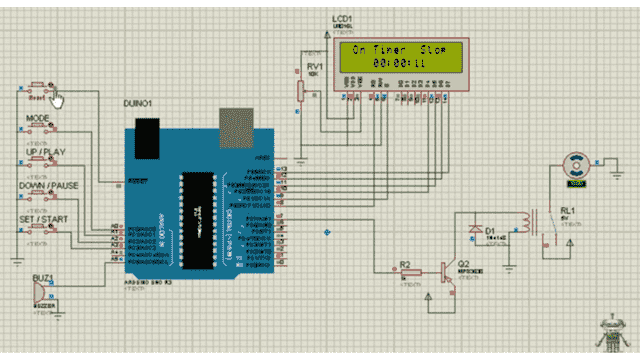
এখন আমরা একটু কানেকশন ডায়াগ্রাম দেখে নেবে কানেকশন ডায়াগ্রাম অনুযায়ী সংযোগ করতে হবে.
এখন আমি কোডিং টা দেখাবো তার আগে আমি যে লাইব্রেরী ফাইলটা এখানে দিচ্ছি এটা ডাউনলোড করে আপনি Arduino IDE সফটওয়্যার এর সাথে এড করে নিবেন ।
কোডিং:
#include <LiquidCrystal.h>
#include "Countimer.h"
Countimer timer;
const int rs = 8, en = 9, d4 = 10, d5 = 11, d6 = 12, d7 =13;
LiquidCrystal lcd(rs, en, d4, d5, d6, d7);
#include <EEPROM.h>
#define bt_set A0
#define bt_up A1
#define bt_down A2
#define bt_start A3
int time_s = 0;
int time_m = 0;
int time_h = 0;
int set=0, mode=0;
int flag1=0, flag2=0, flag3=0;
int relay = 7;
int buzzer = A5;
void setup() {
Serial.begin (9600);
pinMode(bt_set, INPUT_PULLUP);
pinMode(bt_up, INPUT_PULLUP);
pinMode(bt_down, INPUT_PULLUP);
pinMode(bt_start, INPUT_PULLUP);
pinMode(relay, OUTPUT); digitalWrite(relay, HIGH);
pinMode(buzzer, OUTPUT);
lcd.begin(16, 2);
lcd.clear();
lcd.setCursor(0,0);
lcd.print(" Welcome To ");
lcd.setCursor(0,1);
lcd.print(" On/Off Timer ");
timer.setInterval(print_time, 999);
delay(1000);
lcd.clear();
read_on_time();
}
void print_time(){
time_s = time_s-1;
if(time_s<0){time_s=59; time_m = time_m-1;}
if(time_m<0){time_m=59; time_h = time_h-1;}
}
void loop(){
timer.run();
if(digitalRead (bt_set) == 0){
if(flag1==0 && flag2==0){flag1=1;
mode = mode+1;
if(mode>2){mode=0; set=0;}
if(mode==1){read_on_time(); flag3=0;}
if(mode==2){read_of_time(); flag3=1;}
delay(100);
}
}
if(digitalRead (bt_up) == 0){
if(set==0 && mode==0){timer.start(); flag2=1;}
if(set==1){time_s++;}
if(set==2){time_m++;}
if(set==3){time_h++;}
if(time_s>59){time_s=0;}
if(time_m>59){time_m=0;}
if(time_h>99){time_h=0;}
if(set>0 && mode==1){write_on_time();}
if(set>0 && mode==2){write_of_time();}
delay(200);
}
if(digitalRead (bt_down) == 0){
if(set==0 && mode==0){timer.stop(); flag2=0;}
if(set==1){time_s--;}
if(set==2){time_m--;}
if(set==3){time_h--;}
if(time_s<0){time_s=59;}
if(time_m<0){time_m=59;}
if(time_h<0){time_h=99;}
if(set>0 && mode==1){write_on_time();}
if(set>0 && mode==2){write_of_time();}
delay(200);
}
if(digitalRead (bt_start) == 0){
if(mode==0){ flag2=1; flag3=0;
read_on_time();
timer.restart();
timer.start();
}
if(mode>0 && flag1==0){ flag1=1;
set = set+1;
if(set>3){set=0;}
delay(100);
}
}
if(digitalRead (bt_set) == 1 && digitalRead (bt_start) == 1){flag1=0;}
lcd.setCursor(0,0);
if(flag3==0){lcd.print(" On ");}
if(flag3==1){lcd.print("Off ");}
lcd.print("Timer");
if(set==0 && mode>0){lcd.print(" Mode S ");}
if(set==0 && mode==0 && flag2==0){lcd.print(" Stop ");}
if(set==0 && mode==0 && flag2==1){lcd.print(" Start ");}
if(set==1){lcd.print(" Set SS ");}
if(set==2){lcd.print(" Set MM ");}
if(set==3){lcd.print(" Set HH ");}
lcd.setCursor(4,1);
if(time_h<=9){lcd.print("0");}
lcd.print(time_h);
lcd.print(":");
if(time_m<=9){lcd.print("0");}
lcd.print(time_m);
lcd.print(":");
if(time_s<=9){lcd.print("0");}
lcd.print(time_s);
lcd.print(" ");
if(time_s==0 && time_m==0 && time_h==0 && flag2==1){
flag3 = flag3+1;
if(flag3>1){flag3=0;}
if(flag3==0){read_on_time();}
if(flag3==1){read_of_time();}
timer.restart();
timer.start();
digitalWrite(relay, flag3);
digitalWrite(buzzer, HIGH);
delay(500);
digitalWrite(buzzer, LOW);
}
if(flag2==1){digitalWrite(relay, flag3);}
else{digitalWrite(relay, HIGH);}
delay(1);
}
void write_on_time(){
EEPROM.write(1, time_s);
EEPROM.write(2, time_m);
EEPROM.write(3, time_h);
}
void write_of_time(){
EEPROM.write(11, time_s);
EEPROM.write(12, time_m);
EEPROM.write(13, time_h);
}
void read_on_time(){
time_s = EEPROM.read(1);
time_m = EEPROM.read(2);
time_h = EEPROM.read(3);
}
void read_of_time(){
time_s = EEPROM.read(11);
time_m = EEPROM.read(12);
time_h = EEPROM.read(13);
}
উপরে আমি কোডিং টা দিয়ে দিলাম আপনারা কোডিং টা কপি করে নিয়ে কিন্তু আপনি টার্নিং মোটর কন্ট্রোলার তৈরি করতে পারবেন । আপনি আরো ভালোভাবে বুঝতে চাইলে নিচের ভিডিওটা প্লে করে একটু দেখে নিন তাহলে এই প্রজেক্টটি করতে আপনার কোন সমস্যা হবে না ।
ভাই আপনার কাছে অটোমেটিক ইকিউবেটর মেশিন ব্যাবহারের ধারনা পাওয়া যাবে।