
আজকে আমি আপনাদের বোঝানোর চেষ্টা করবো যে আপনারা বিভিন্ন প্রজেক্টে কিভাবে স্টেপার মোটর/stepper motor ব্যবহার করবেন । অনেকেই আমরা স্টেপার মোটর কে বিভিন্ন প্রজেক্টে ব্যবহার করতে চাই ।কিন্তু সঠিকভাবে জানি না যে এটা কোডিং এর মাধ্যমে কিভাবে কন্ট্রোল করা হয় । এই পোষ্টের মাধ্যমে আমি আপনাদের দেখাবো যে আপনারা কিভাবে আরডুইনো কোডিং করে স্টেপার মোটর কে যেকোনো স্টেপে বা যেকোনো ডিগ্রিতে যেমন খুশি তেমন আপনি কন্ট্রোল করতে পারবেন ।
আরডিওনো কোডিং এর মাধ্যমে আমরা যে স্টেপার মোটর কন্ট্রোল করব সেটা হচ্ছে সবথেকে বেশি পাওয়া যায় মোটর 28-BYJ48 এবং এটি কীভাবে ULN2003 স্টেপার মোটর মডিউলটি ব্যবহার করে আরডুইনোর সাথে ইন্টারফেস করব তা শিখব।
চলুন জেনে নেয়া যাক এই স্টেপার মোটর কি কি কাজে বেশি ব্যবহার করা হয়….
Stepper Motor:
- সিসি ক্যামেরায় এটা ব্যবহার করা হয়ে থাকে ।
- সিএনজি মেশিন তৈরিতে ব্যবহার করা হয় ।
- রোবটিক্স এ ব্যবহার করা হয় ।
- Robotic Car.
- Human robot.
- বিভিন্ন ধরনের মেশিনে এটি ব্যবহার করা হয় ।
এছাড়া দৈনন্দিন জীবনে বিভিন্ন প্রজেক্টে কিন্তু এই স্টেপার মোটর অনেক বেশি ব্যবহার করা হয় ।চলুন তাহলে আমরা বিস্তারিত জেনে নিই যে এই স্টেপার মোটর কিভাবে ব্যবহার করা হয় ।
28-BYJ48 Stepper motor।
ULN2003 স্টেপার মোটর মডিউল ।

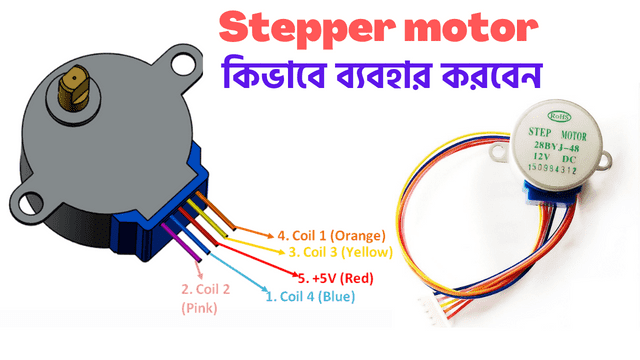
স্টেপার মোটর টি সিম্পল ডিসি মোটরের মতো দেখতে কিন্তু এর কাজটি ভিন্ন ।এই মোটরে 5 কালারের পাঁচটি তার রয়েছে এখন কেন এই পাঁচ কালারের পাঁচটি তার রয়েছে এটা বুঝতে হলে,এটি বুঝতে আমাদের প্রথমে জেনে রাখা উচিত যে একটি স্টিপার কীভাবে কাজ করে এবং এর বিশেষত্ব কী। প্রথমত স্টেপারগুলির মোটরগুলি ঘুরবে না, তারা পদক্ষেপ নেয় এবং তাই তারা স্টেপ মোটর নামেও পরিচিত। অর্থ, তারা একবারে কেবলমাত্র এক ধাপ এগিয়ে যাবে। এই মোটরগুলিতে তাদের মধ্যে কয়েলগুলির ক্রম রয়েছে এবং মোটামুটি ঘোরানোর জন্য এই কয়েলগুলিকে একটি নির্দিষ্ট ফ্যাশনে ভোল্টেজ দেওয়া হয়। যখন প্রতিটি কয়েল ভোল্টেজ পাচ্ছে মোটর একটি পদক্ষেপ নেয় এবং শক্তির ক্রমটি মোটরকে অবিচ্ছিন্ন পদক্ষেপ নিতে বাধ্য করে, এইভাবে স্টেপার মোটর টি কাজ করে । আমরা মোটরের অভ্যন্তরে থাকা কয়েলগুলিতে এক নজরে দেখে নেওয়া যাক এই তারগুলি কোথা থেকে এসেছে exactly ।
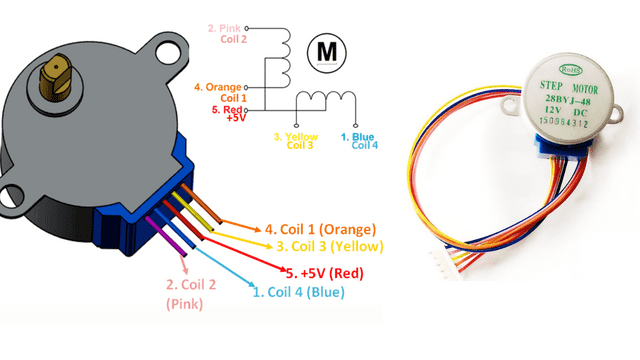
আপনি দেখতে পাচ্ছেন মোটরটিতে ইউনিপোলার 5-লিড কয়েলের ব্যবস্থা রয়েছে। এখানে চারটি কয়েল রয়েছে যা একটি নির্দিষ্ট ক্রমকে শক্তিশালী করতে হবে। লাল তারগুলি + 5V সরবরাহ করা হবে এবং বাকি চারটি তারের কুণ্ডলীটি ট্রিগার করার জন্য নিদৃষ্ট কোডিং যুক্ত মাইক্রোকন্ট্রোলারের পিনের সাথে সংযুক্ত করতে হবে। আমরা আরডুইনোর মতো একটি মাইক্রোকন্ট্রোলার ব্যবহার করি একটি নির্দিষ্ট ক্রমে এই কয়েলগুলিকে শক্তিশালী করে এবং মোটরটিকে প্রয়োজনীয় সংখ্যক পদক্ষেপগুলি সম্পাদন করতে পারি। এখন, কেন এই মোটরটিকে 28-BYJ48 বলা হয়? আমি জানি না এই মোটরটির নামকরণের কোনও প্রযুক্তিগত কারণ নেই। আসুন নীচের ছবিতে এই মোটরটির ডেটাশিট থেকে প্রাপ্ত কয়েকটি গুরুত্বপূর্ণ প্রযুক্তিগত তথ্য দেখি।
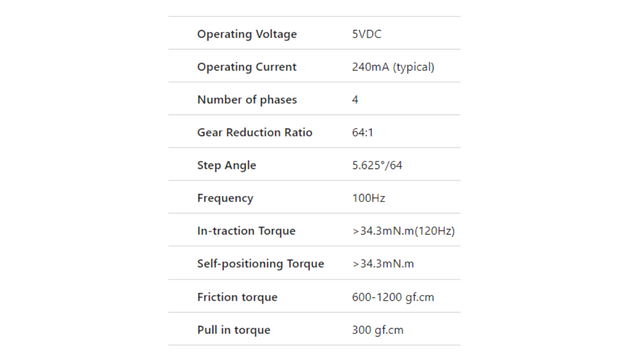
উপরে যে তথ্যগুলো আমি দিয়েছি,সেগুলো শুধুমাত্র 28-BYJ48 Stepper motor এর জন্য আপনারা যে স্টেপার মোটর ব্যবহার করবেন তার ইনফর্মেশন এবং ডাটাশিট দেখে নিবেন যাতে আপনার আরডিওনো কোডিং করতে সুবিধা হয়। প্রথমে আমরা জানি যে এটি 5v স্টিপার মোটর যেহেতু আমরা পাঁচটি তারের লাল তার দিয়ে 5v প্রেরণ করছি। তারপরে, আমরা আরও জানি যে এটি একটি চার ধাপের স্টিপার মোটর যেহেতু এতে চারটি কয়েল রয়েছে। এখন, গিয়ার অনুপাত 1:64 দেওয়া হবে। এর অর্থ আপনি যে শ্যাফটটি বাইরে দেখছেন তা কেবলমাত্র একটি সম্পূর্ণ ঘূর্ণন তৈরি করবে যদি কেবল মোটরটি ভিতরে 64৪ বার ঘোরে। এটি মোটর এবং আউটপুট শ্যাফটের মধ্যে সংযুক্ত গিয়ারগুলির কারণে, এই গিয়ারগুলি টর্ক বাড়িয়ে তুলতে সহায়তা করে। লক্ষ্য করার জন্য অন্য একটি গুরুত্বপূর্ণ ডেটা হ’ল স্ট্রাইড এঙ্গেল: 5.625 ° / 64। এর অর্থ হ’ল 8-পদক্ষেপের সিকোয়েন্সে পরিচালিত মোটরটি প্রতিটি ধাপের জন্য 5.625 ডিগ্রি স্থানান্তরিত করে এবং একটি পূর্ণ ঘূর্ণন সম্পন্ন করতে এটি 64 টি পদক্ষেপ (5.625 * 64 = 360) নেবে।
Calculating the Steps per Revolution for Stepper Motor:
আপনার স্টেপার মোটরের জন্য কীভাবে প্রতিটি ঘূর্ণনের প্রতি পদক্ষেপগুলি গণনা করতে হবে তা জানা গুরুত্বপূর্ণ কারণ কেবলমাত্র আপনি তখন কার্যকরভাবে এটি প্রোগ্রাম করতে পারবেন। আরডুইনোতে আমরা মোটরটি 4-পদক্ষেপের ক্রমতে পরিচালনা করব যাতে স্ট্রাইড কোণটি 11.25 be হবে যেহেতু এটি 8 পদক্ষেপের ক্রমের জন্য 5.625 ° (ডেটাসিটে দেওয়া) এটি হবে 11.25 ° (5.625 * 2 = 11.25)।
Steps per revolution = 360/step angle
Here, 360/11.25 = 32 steps per revolution.
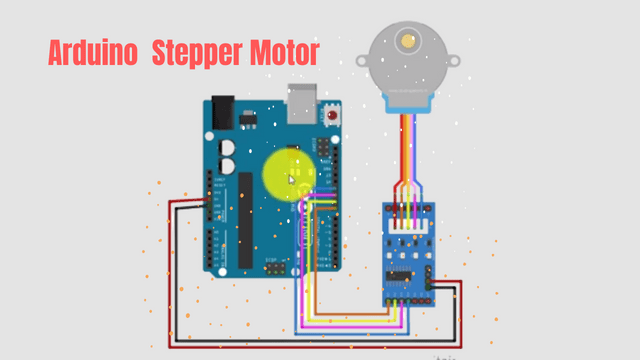
আরডিওনো সাথে এর কিভাবে কানেকশন করতে হবে নিচের কানেকশন ডায়াগ্রাম দেওয়া হল..
Code for Arduino Board:
আমরা আমাদের আরডুইনো দিয়ে প্রোগ্রামিং শুরু করার আগে আসুন প্রোগ্রামের ভিতরে কী হওয়া উচিত তাবোঝার চেষ্টা করি। পূর্বে যেমন বলা হয়েছে আমরা 4-পদক্ষেপের সিকোয়েন্স পদ্ধতিটি ব্যবহার করব তাই আমাদের একটি সম্পূর্ণ ঘূর্ণন তৈরি করার জন্য চারটি ধাপ থাকবে।
code:
#include <Stepper.h>
const int stepsPerRevolution = 200; // change this to fit the number of steps per revolution
// for your motor
// initialize the stepper library on pins 8 through 11:
Stepper myStepper(stepsPerRevolution, 8, 9, 10, 11);
void setup() {
// set the speed at 60 rpm:
myStepper.setSpeed(60);
// initialize the serial port:
Serial.begin(9600);
}
void loop() {
// step one revolution in one direction:
Serial.println("clockwise");
myStepper.step(stepsPerRevolution);
delay(500);
// step one revolution in the other direction:
Serial.println("counterclockwise");
myStepper.step(-stepsPerRevolution);
delay(500);
উপরে আমি কোডিং টা দিয়ে দিলাম । আপনারা যদি আরো ভালোভাবে স্টেপার মোটর সম্পর্কে জানতে চান ,বা কন্ট্রোলিং সম্পর্কে প্র্যাকটিক্যাল সহকারে বুঝতে চান । তাহলে নিচের এই ভিডিওগুলো একটু দেখুন । আশাকরি এই ভিডিওগুলো দেখলে আপনি স্টেপার মোটর নিয়ে যেকোন প্রজেক্ট করতে পারবেন ।